Orionfold Arena — Control Plane
The cockpit stops recording and starts dispatching — re-evaluate models and auto-confirm leaderboard regressions.
What it took to build
The feature tour
The control plane board
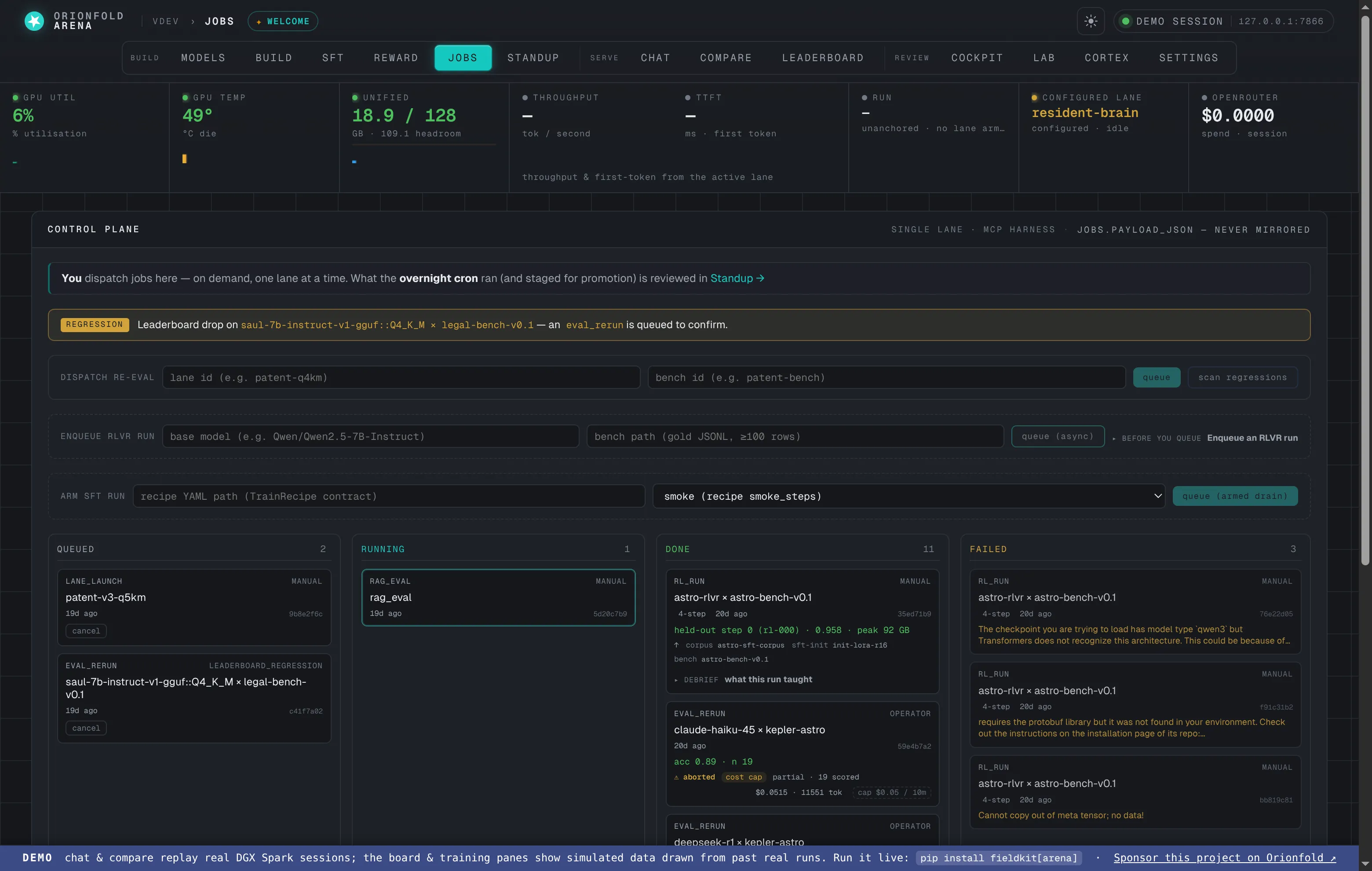
A live four-column board — queued, running, done, failed — over every re-evaluation the Spark is working through, with the resident lane and the unified-memory envelope on the rail above it.

Dispatch a re-eval, or scan for regressions
Type a lane and a bench and queue a re-evaluation by hand, or hit 'scan regressions' to diff the live leaderboard against its baseline and auto-queue a confirming re-eval for every score that slipped.
Every job, every state, every result
Each card carries its kind and what triggered it; done cards show the measured accuracy and how many questions were scored; a failed card tells you exactly why — so the board is the whole story without opening a log.
A cockpit that dispatches, not just records
The Arena control plane is the jobs board that lets one operator trigger model work from a single screen on a DGX Spark — re-evaluate a model against the exact bench it was scored on, watch the leaderboard for regressions, and have a confirming re-eval queue itself the moment a score slips. It is a new surface inside Orionfold Arena, the local-LLM cockpit, and it changes what the cockpit is.
Until now the Arena was a recorder: it watched lanes run, captured chats and compares, and published a leak-proof leaderboard over your own results. The control plane promotes it to a dispatcher — the place you start work from, not just the place you read it back. If you fine-tune, quantize, and publish models on a Spark and you want a control room that not only shows you a regression but acts on it, this is that room. Everything still runs on the machine under your desk, and the job payloads — the lanes and benches and prompts a job operates on — never leave it.
What it unlocks
A leaderboard tells you a number moved. A control plane lets you do something about it without leaving the page. That is the whole shift: the loop between noticing a regression and confirming it closes inside the cockpit, on the same hardware that produced the numbers in the first place.
For a researcher, that turns evaluation from a chore you remember to run into a property the cockpit maintains. Ship a new quantization, and a single “scan regressions” diffs the live accuracy leaderboard against its last baseline; any score that dropped past a threshold enqueues a confirming re-evaluation automatically, so a real regression separates itself from eval noise before you have to think about it. You can also reach for the board deliberately — re-score a specific lane against a specific bench when you’ve changed something and want the number refreshed — and watch it move through queued → running → done with the measured accuracy on the card when it lands.
For a Spark operator, it is one board over work that used to live in a dozen terminal invocations. The Arena drains one job at a time, one lane resident, because GPU and system memory share the same 128 GB pool — so the control plane respects the envelope by construction rather than asking you to. And every job is dispatched through the same MCP harness the autonomous agent uses, which means the safety rails are defined once: the tool list the dispatcher can reach is the policy, and a job can only ever call the read-and-measure tools on it.
How it got built — a sprint over a substrate that already existed
The control plane was specified, built, fixed, and shipped in a single focused sprint of about two and a half hours on one afternoon. That number is the whole point of the build story, and it is honest precisely because almost none of the milestone was greenfield.
The pieces a dispatcher needs were already on the machine. The execution surface — the MCP harness that the agent already drives the Spark through with zero tool-call format errors — existed. The scoring path it calls — the bench loader, the deterministic and judge-based scorers, the per-question score table, the accuracy rollup behind the leaderboard — existed. Even the socket the queue plugs into (a dormant per-run status row) had been drilled in an earlier milestone and was waiting to be activated. The control plane is, in the spec’s own words, connective tissue, not greenfield: the work was wiring a queue and a board onto surfaces that were already load-bearing.
So the sprint added a job dispatcher module, a schema migration for the
jobs and job_triggers tables, four REST endpoints with a server-sent-events
feed, a leaderboard-regression detector and its producer, two new harness tools
the dispatcher calls, and a Preact board to drive it all — then a follow-up pass
that wired the re-eval’s bench resolution and the regression producer end to end
after a live walk-through surfaced the two gaps between built and
demonstrable. The milestone shipped inside fieldkit v0.16.0, the first
packaged Arena release.
The build, measured. ~2.6 hours of wall-clock across one afternoon — six commits from the spec lock to the v0.16.0 release; 1,762 lines of authored source (the dispatcher, the API and its SSE stream, the schema migration, the regression detector, the two harness tools, and the cockpit board, with the ~630 lines of new tests counted separately); 35 tests for the dispatcher and its API, part of a 37-case M8 set that also planted a payload-leak sentinel and reshaped the harness suite to the nine-tool surface. The agentic effort behind it: 2 Claude Code sessions, 107 assistant turns, 18.6M tokens processed of which 95.9% were served from the prompt cache, and only 104k tokens actually generated. It was built entirely on Claude Opus 4.8 — the same model that now drives the daily work, so there is no model handoff in this one, just a single driver moving a spec to a shipped release in an afternoon.
The build-metrics infographic is rendered by the site from the mined build:
block; every figure traces back to assets/build-metrics.json.
The cache ratio is the quiet reason a milestone like this lands in hours rather than days: at ~96% cache hits the model holds the entire arena codebase — store, server, mirror, harness, the spec — in working context and spends fresh tokens only on the new wiring, not on re-reading what it already knows.
The feature tour
The control plane is one route — /arena/jobs/ — so the tour is the anatomy of a
single board: what it shows, how you trigger work, and what each card tells you.
The control plane board
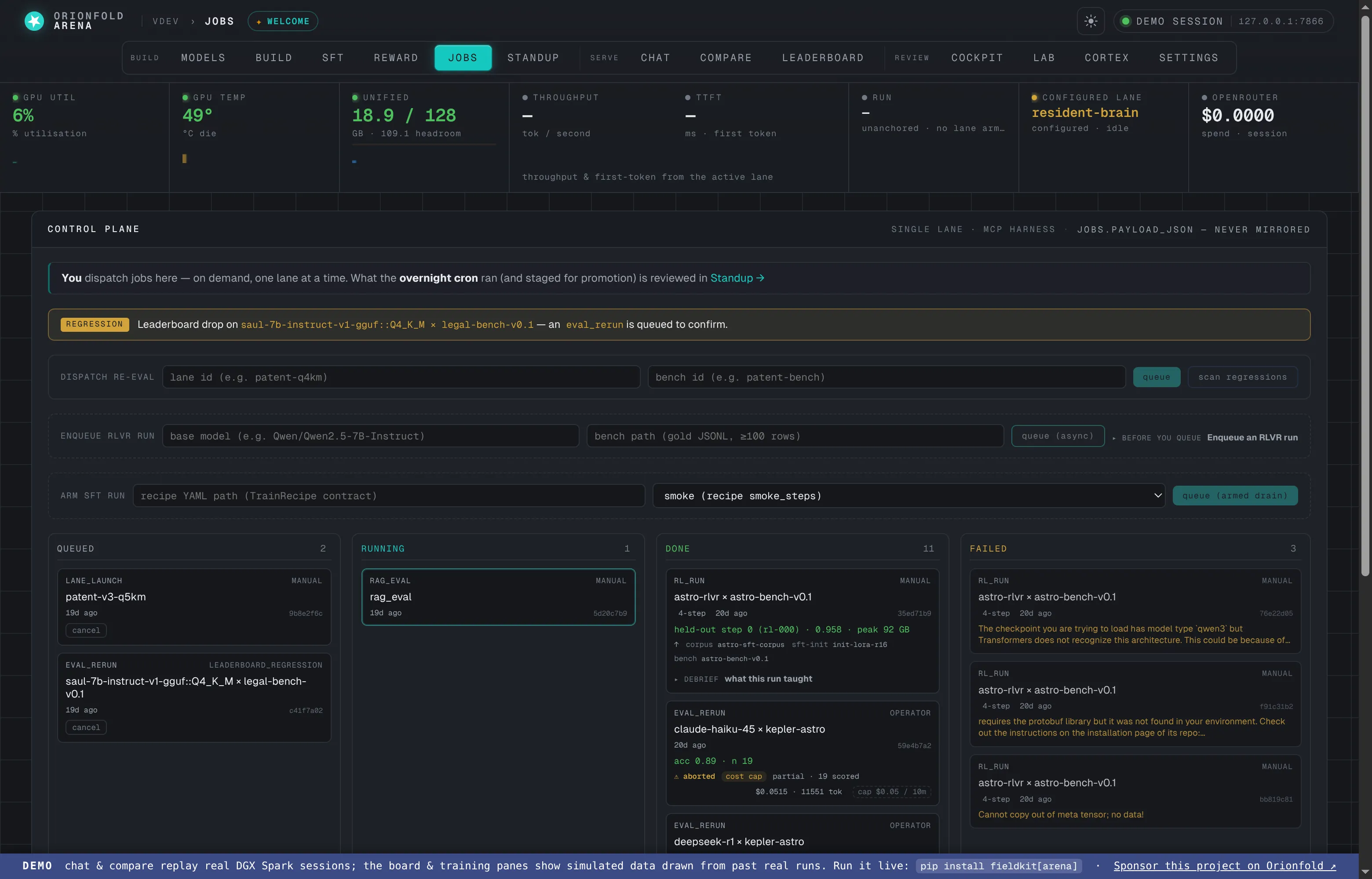
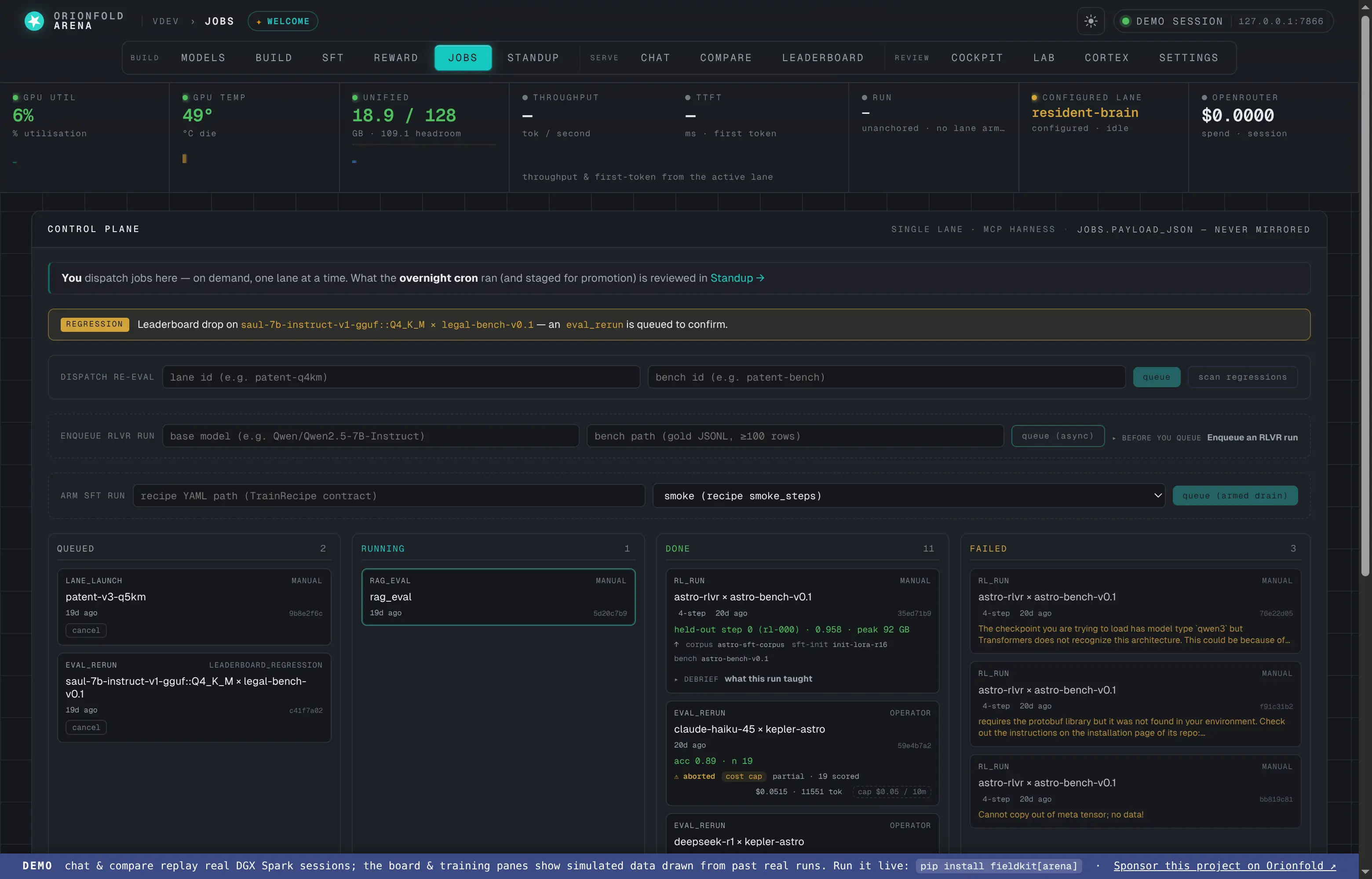
One screen: the live telemetry rail, the dispatch forms, and the four-column board of every job the Spark is working through — queued and running idle here, done and failed carrying real work.
The board is the cockpit’s new home for work-in-flight. The same instrument rail
that fronts every Arena page sits across the top — GPU utilization, die
temperature, the unified-memory envelope with its headroom, and the resident lane
(here the configured Advisor lane, a Qwen3-30B-A3B GGUF) — so you watch the machine’s
state while the queue
drains. Below it, four columns track each job from queued through running to
done or failed. The header line states the two invariants that make this safe
to leave running: single lane (one model resident at a time, inside the
128 GB pool) and MCP harness (every job executes through the curated tool
surface), with the reminder that jobs.payload_json is never mirrored.
Dispatch a re-eval, or scan for regressions

Queue a re-eval by hand, or hit scan regressions — a regression banner rises above this form when a leaderboard drop has auto-enqueued a confirming re-eval.
This is where the cockpit stops being passive. Type a lane and a bench and queue
a re-evaluation directly; the dispatcher claims it, runs it through the harness on
the resident lane, and folds the result back into the leaderboard. Or press
scan regressions and the detector diffs the live accuracy leaderboard against
its stored baseline — the first scan just sets that baseline, and every scan after
it auto-queues a confirming eval_rerun for any score that has slipped past the
threshold. When it does, the regression banner surfaces it in plain language —
“Leaderboard drop on legal-q5km × legal-bench — an eval_rerun is queued to
confirm” — so a real drop announces itself and a cheap re-measure decides whether
it was signal or noise before anything downstream reacts. A unique-key gate
coalesces duplicate triggers so a noisy bench can never start a re-eval storm.
Every job, every state, every result
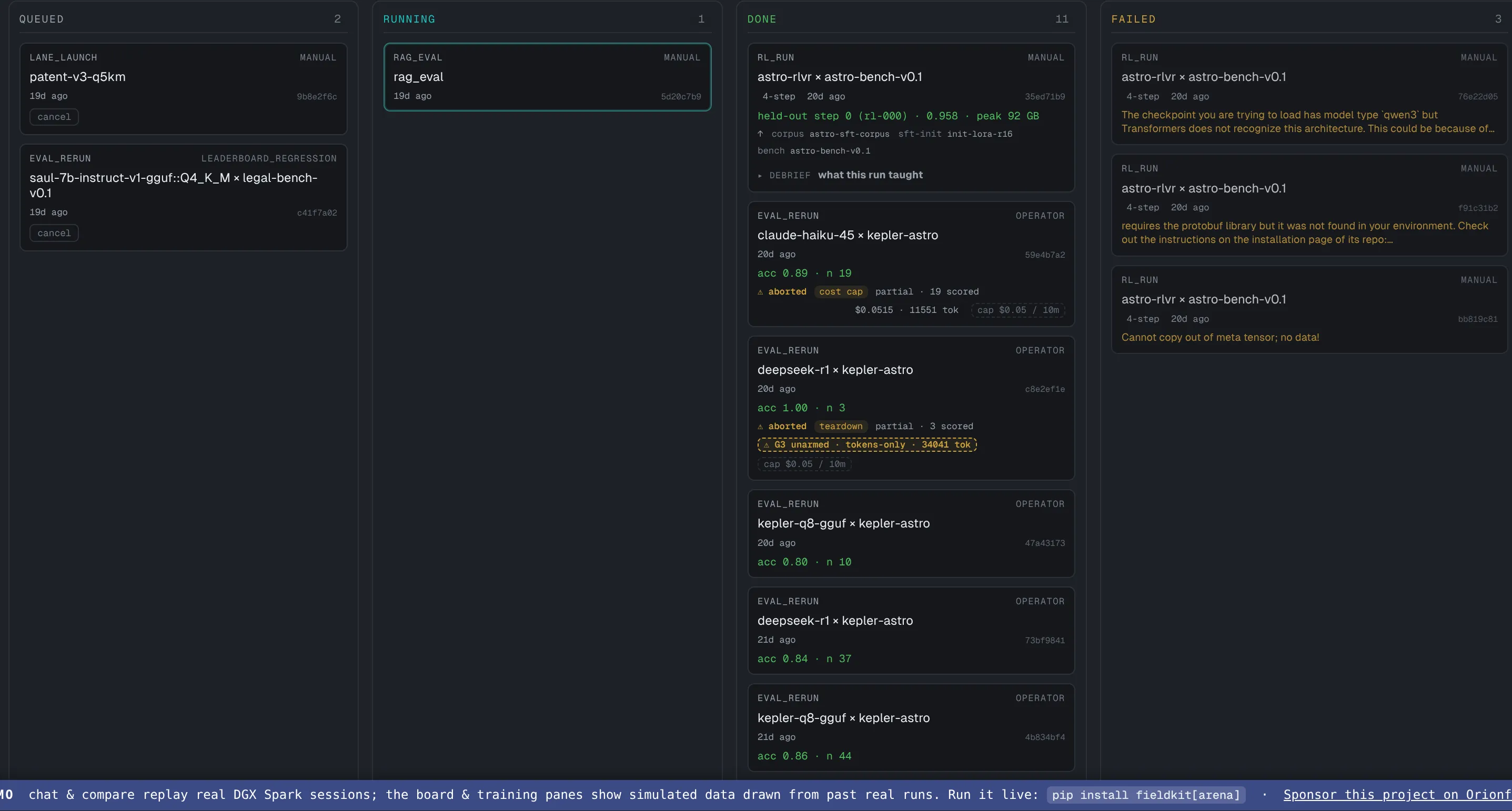
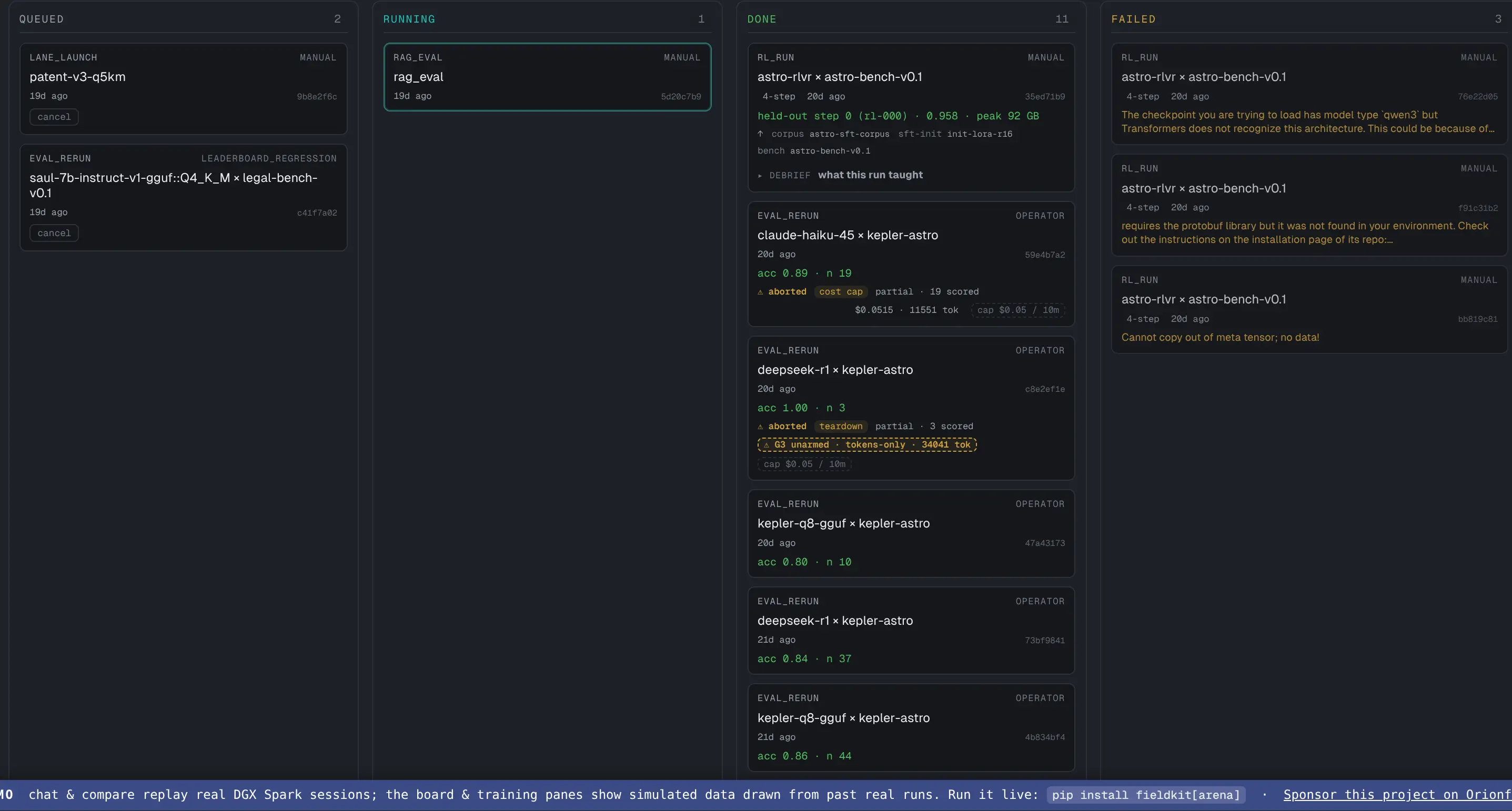
Each card carries its kind and trigger; a done card shows its result; a failed card says exactly why.
The card is the whole story at a glance. Every job names its kind — an
eval_rerun, a lane lane_launch/lane_teardown, an rl_run — and what
triggered it — manual, leaderboard_regression, or stale_bench — so you
always know whether you asked for this work or the cockpit did. A job still
waiting carries a cancel button. A done card shows its result: a measured
accuracy for an eval (acc 0.82 · n 25), the GB freed for a teardown, the port a
lane came up on. A failed card carries the reason inline — here, a guarded
pre-flight that refused before acting — so the board diagnoses itself rather
than sending you to a log. Because the jobs table is on the never-mirror list, this board exists only
against a live sidecar; the public mirror renders a “cockpit offline” state by
construction, because the work — and the prompts inside it — is yours alone.
Built on the substrate
The reason a control plane shipped in an afternoon is that it is a thin layer
over fieldkit, the toolkit the whole Arena rides on. The milestone named its
modules and wired into them rather than rebuilding them:
fieldkit.arenagained the dispatcher itself — thejobsmodule with the enqueue/claim/drain loop, the regression detector and its producer, the schema migration, and the REST-plus-SSE surface — packaged so the board ships inside the wheel and runs from one command.fieldkit.harnessis the execution surface every job runs through. The milestone added two tools to it by demand — one to re-evaluate a lane against a bench, one to measure a manifest’s variants — its first wiring of the eval layer into the harness, so the dispatcher and the autonomous agent share one set of rails.fieldkit.evalis the scoring path the re-eval calls: the bench loader, the deterministic and judge scorers, and the accuracy rollup the regression detector diffs. The control plane gave that machinery a trigger; it didn’t reinvent it.fieldkit.nimand the local-serving patterns are what a job re-measures against when a lane is served — and the reason a job fails honestly with “no lane served” rather than guessing when one isn’t.
The leverage is the story. The dispatcher diffs a leaderboard that was already being rebuilt from real runs, re-scores against benches the models were already measured on, and executes through a harness an agent was already driving safely. The control plane is the assembly of that compounding work into a surface you can press a button on — not a fresh start.
The workflow, generalized
Step back and the method is the takeaway. A solo operator on a single DGX Spark, driving Claude Opus 4.8 through the Claude Code harness over a toolkit that keeps maturing, took a control-plane milestone from a written spec to a shipped, tested, released surface in a single afternoon. The speed came from leverage at every layer: a package that already did the hard parts, a year of measured data to act on, and a harness whose ~96% cache-hit rate let the model hold the entire codebase in context and spend fresh tokens only on the new wiring.
It also came from closing the loop between built and demonstrable in the same session — a live walk-through of the board surfaced two gaps (the re-eval’s bench resolution and the regression producer weren’t wired end to end), and both were fixed and re-tested before the milestone was called done. That is the repeatable shape: spec the surface, build it over what exists, drive it live, fix what the walk-through reveals, ship. Point it at your own shelf of models and your own Spark and the same loop applies.
What the board grew into
The launch promised that later phases would extend this jobs table rather than invent their own queue. They did. The surfaces below shipped in the weeks after the sprint — each one another kind of work flowing through the same dispatcher, the same single-lane envelope, the same harness rails.
The dispatch row grew from one job kind to three: re-eval a lane, enqueue an RLVR run, or arm an SFT run from a recipe contract — all draining through the same four columns.
The board’s biggest growth is what it can start. Alongside the original
lane-times-bench re-eval, the dispatch row gained a fine-tune smoke slot — a
base model plus a small gold bench, capped at twenty rows, to answer “is this
base worth training?” before any long run — and a training run slot that
takes a recipe file (the TrainRecipe contract) and launches it as a job. The
banner above the form states the division of labor plainly: you dispatch here,
on demand, one lane at a time; what the overnight cron ran is reviewed in
Standup.
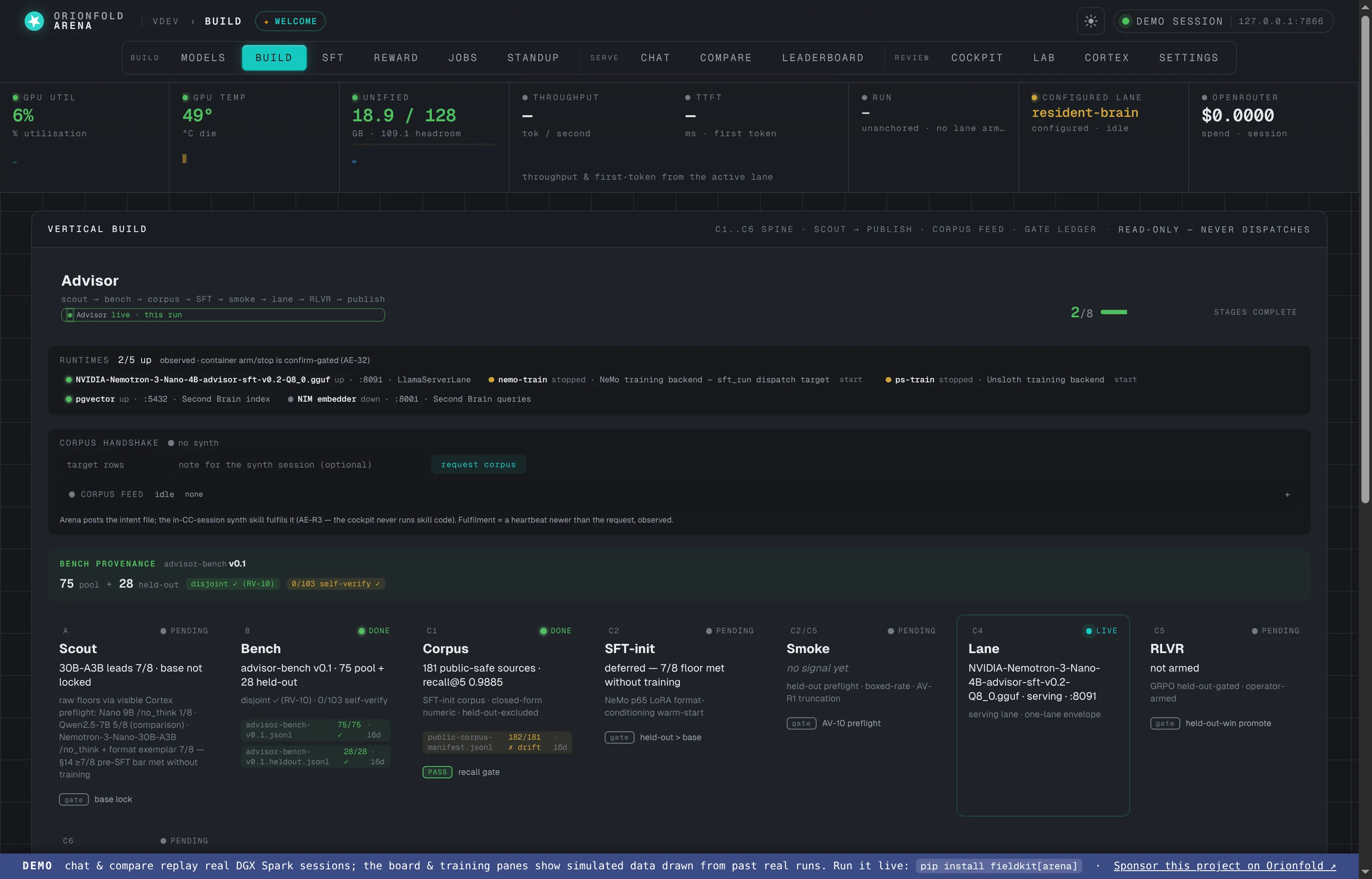
A whole vertical build as one spine: each stage card carries its receipts, and the bench-provenance strip pins exactly which frozen bench scored what.
When those training jobs belong to a vertical — a domain model being scouted, benched, corpus-fed, fine-tuned, and RL-polished — the Build pane assembles them into a spine. Each stage is a card with its own receipts; the strip above pins bench provenance so a score is never separable from the frozen bench that produced it. This is the machine-that-builds-machines view: the board dispatches the stages, the spine shows the build they add up to.
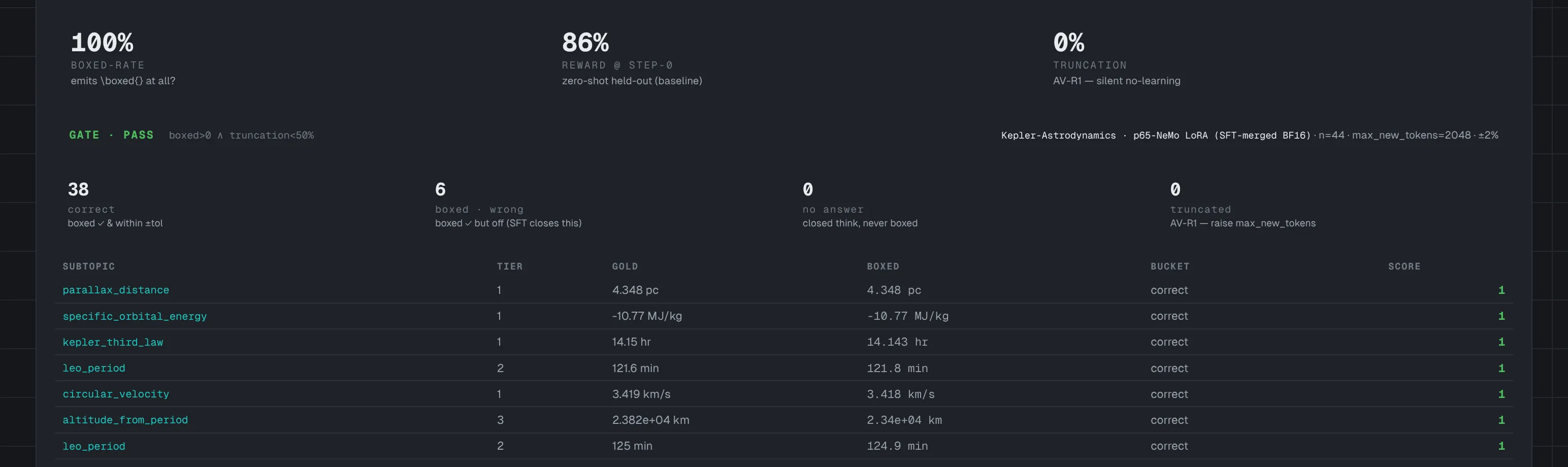
Eval-is-reward, made visible: the same bench verifier that scores the leaderboard is the reward signal the training run optimizes — one gauge watches both.
The Reward pane closes the conceptual loop the launch article only gestured at. The bench verifier is the reward: the gauge shows the SFT warm-start’s step-zero baseline (does it produce boxed, scorable answers at all?) and then the live reward as an RL run trains, with a gate that holds promotion until the signal is clean. The pane is read-only by design — it watches, it never dispatches.
Bounds on metered work: a cost cap and a stall window arm themselves at dispatch — born from a real cloud eval that once hung for hours accruing uncapped spend.
Dispatching cloud comparisons earned the board guardrails. A per-run cost cap and a stall timeout now arm at dispatch time as an immutable snapshot on the job — the fix for a real OpenRouter eval that once hung for two and a half hours holding the lane and accruing uncapped spend. Local Spark lanes run unguarded and unaffected; the bounds exist exactly where the meter does.
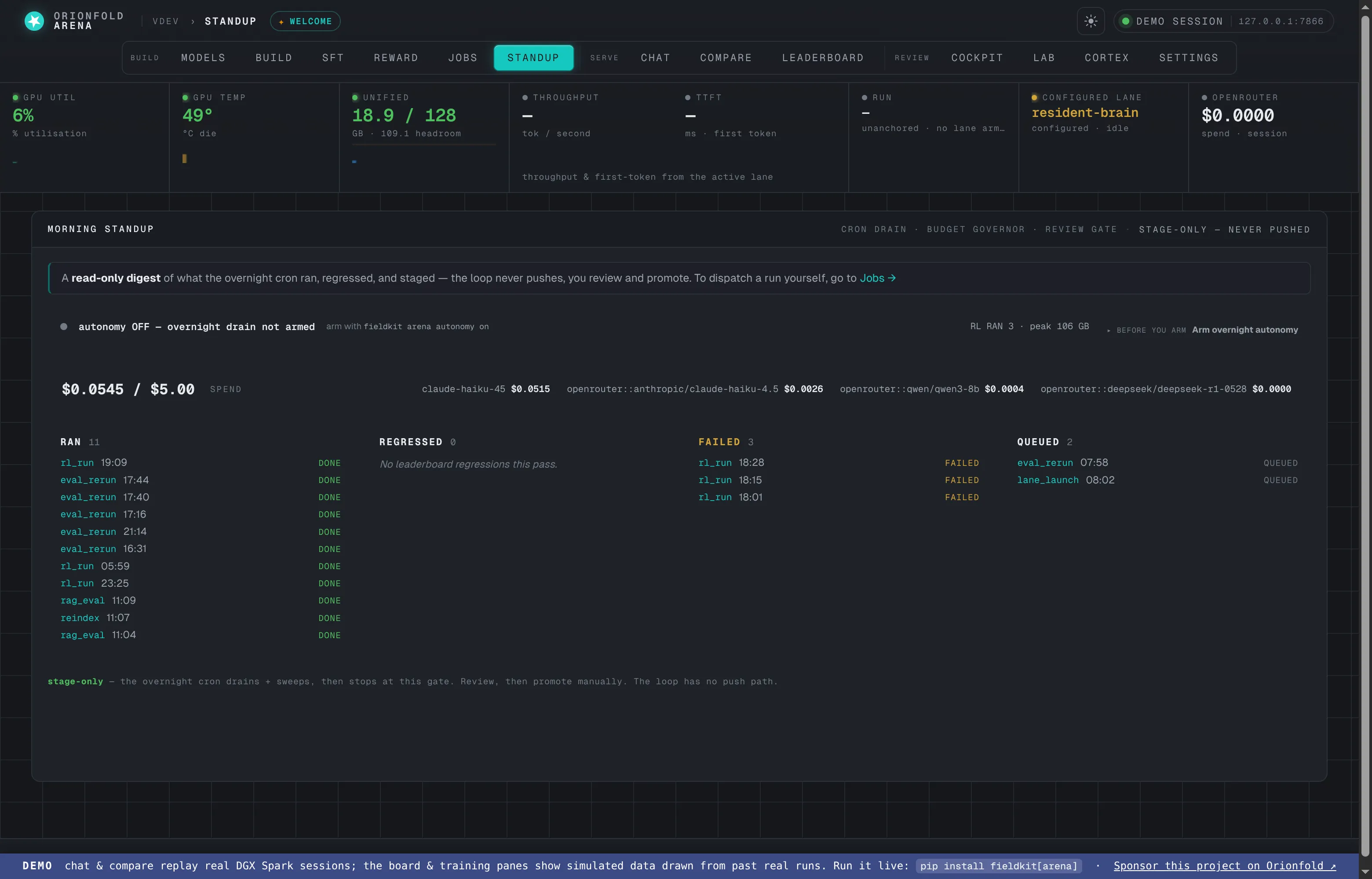
The overnight loop’s report card: ran, regressed, failed, queued, and spend — the cron drains and stages, then stops at this gate for the operator to review and promote.
And the promised cron layer landed as Standup — a read-only morning digest of what the overnight drain ran, regressed, and staged. The loop is stage-only: it sweeps the queue, runs the work, and stops at this gate. It has no push path; you review, then promote. A batch drained, zero regressions, a handful of honest failures, seven cents of spend against a five-dollar governor — that is what delegated overnight work looks like when the board doing it was built to be left running.
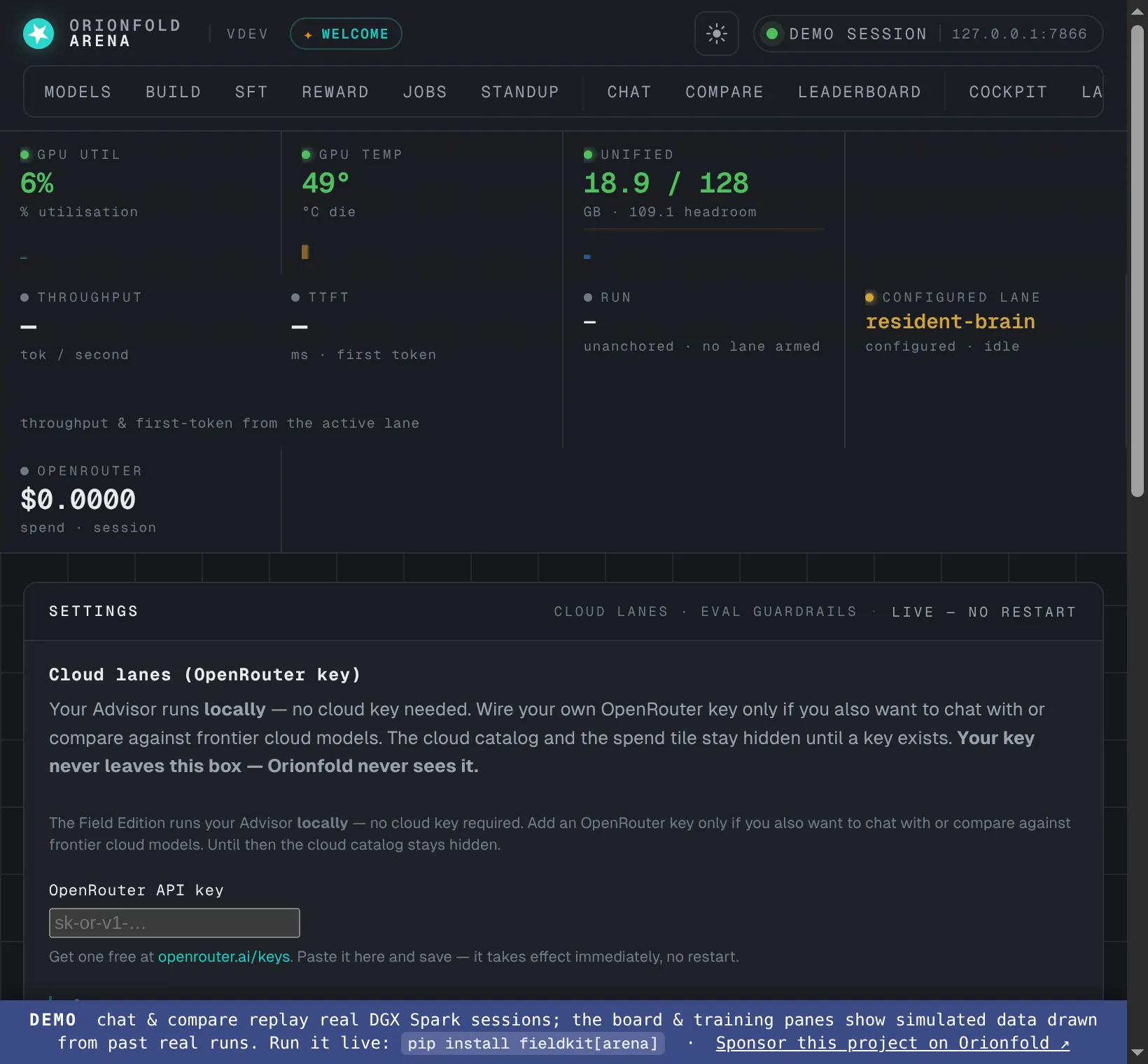
Get it
The control plane ships inside fieldkit — it arrived in v0.16.0, the first
packaged Arena release, and every surface above extends the same install: start
the sidecar and open /arena/jobs/ to dispatch re-evaluations, scan for
regressions, and watch the board drain. A live web preview of the Arena runs at
/arena/demo/. The roadmap the launch sketched — a cron layer
draining the queue overnight, training jobs flowing their results back to the
leaderboard — is the section you just read, landed on the same jobs table it
promised to extend. Bring your own models and your own benches; the control
plane is waiting to dispatch them.